Новое исследование того, как сом захватывает добычу, дает беспрецедентное представление о внутренней механике черепов рыб и может вдохновить на создание новых подводных роботов. Хотя ведущий исследователь Аарон М. Олсен из Университета Брауна в Провиденсе, штат Род-Айленд, начал исследование просто для того, чтобы лучше понять, как работают рыбы, он в конечном итоге обнаружил параллели между тем, как рыба ловит добычу и манипулирует ею, и тем, как люди или даже роботизированные системы захватывают объекты и манипулируют ими.
"У рыб нет рук, как у нас, чтобы хватать добычу. А под водой их жертва может вращаться и свободно перемещаться в трех измерениях или даже уплывать. Даже когда рыба ловит добычу, ей все равно приходится ее перемещать и переориентировать. внутри их рта , как и у нас с языком. Но рыбам также не хватает гибкого языка. Это невероятно сложно," - говорит Олсен. "Самое близкое к тому, чтобы на собственном опыте узнать, каково есть рыбу, - это, вероятно, подпрыгивание яблок," - пошутил Олсен.
Чтобы понять, как рыба преодолевает эту проблему, Олсен и соавторы, Патрисия Л. Эрнандес из Университета Джорджа Вашингтона и Элизабет Л. Брейнерд из Университета Брауна изучили канального сома, который чаще всего ловится в США. Олсен и его соавторы использовали рентгеновский метод захвата движения под названием "Реконструкция движущейся мофологии с помощью рентгеновских лучей", чтобы снимать канальных сомов, когда они ловили и глотали пищу. Эта технология дает исследователям нечто вроде рентгеновского зрения, позволяя им видеть рыбу изнутри, пока она ест. И есть на что посмотреть: в то время как человеческие черепа имеют только одну движущуюся челюстную кость, рыбы имеют более десятка подвижных костей, соединенных вместе, чтобы сформировать то, что инженеры называют связью или механизмом, серией жестких звеньев, соединенных гибкими суставами.
Исследователи обнаружили, что череп канального сома и, вероятно, многих других видов рыб функционирует как 17-звенный механизм, ранее не идентифицированный в биомеханических или созданных человеком системах. "Раньше мы знали, что у рыб в черепе есть несколько четырех- и даже шести-стержневых связей," - говорит Олсен, "но мы не выяснили, как эти связи соединяются и функционируют вместе. Благодаря этому исследованию теперь у нас больше всего полное представление того, как череп рыбы функционирует механически."
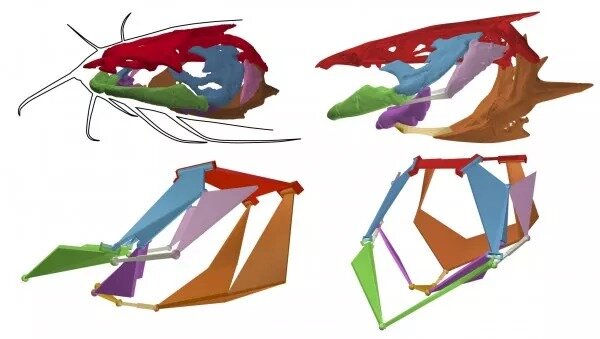
Кости черепа канального сома (вверху) и соответствующий 17-звенный механизм (внизу). Предоставлено: Аарон Олсен.
Механизмы с 17 звеньями, напоминающие сложное механическое устройство, позволяют рту двигаться несколькими различными способами, влияя на движение воды и пойманной добычи. Это включает в себя открытие передней части рта или губ, расширение средней части рта по горизонтали, расширение горла по вертикали и расширение или расширение жабр. Авторы обнаружили, что этот механизм создает по крайней мере три различных типа "волн" жидкости во рту: волна спереди назад, чтобы втягивать добычу, волна сзади на фронт, которая толкает добычу вперед, и то, что они называют волна сжатия, которая может действовать для более точного позиционирования добычи во рту.
Что, возможно, удивительно для большинства людей, так это то, что рыбий рот - это не простой механизм открывания и закрывания. "Она может двигаться множеством разных способов," - заметил Олсен. "Но что еще удивительно, так это то, что, хотя у рыбы есть все эти движущиеся части, на самом деле они двигают ртом только семью различными способами, чтобы поймать и проглотить пищу. Рот рыбы на самом деле больше похож на нашу руку, чем на наш рот. Мы можем двигать каждой рукой примерно семью различными способами, чтобы дотянуться до объектов в окружающей среде и схватить их. Несмотря на то, что и рыбий рот, и человеческая рука выглядят совершенно по-разному, они следуют этому фундаментальному принципу: если вы хотите манипулировать объектом, вы должны иметь возможность двигаться множеством разных способов."
Олсен считает, что их открытия могут вдохновить на усовершенствование конструкции роботов, которые захватывают и манипулируют объектами под водой, что является частью постоянно развивающейся области, называемой биоинспирированным дизайном. "Спроектировать робота, который может управлять плавающими объектами под водой, очень сложно. У подводных автономных транспортных средств может быть роботизированная рука, такая как наша собственная рука, которая хорошо работает для манипулирования более тяжелыми предметами, но не сможет схватить или может раздавить плавающий объект. И они могут иметь всасывающее устройство, которое может всасывать или выдувать плавающие предметы, но не может их перемещать и вращать с высокой точностью. Проектирование чего-то более близкого по структуре ко рту рыбы может иметь преимущество. У Fish были сотни миллионов лет, чтобы разработать всевозможные решения для этого типа проблем - я думаю, нам еще есть чему у них поучиться."
Источник: Society for Integrative & Comparative Biology